
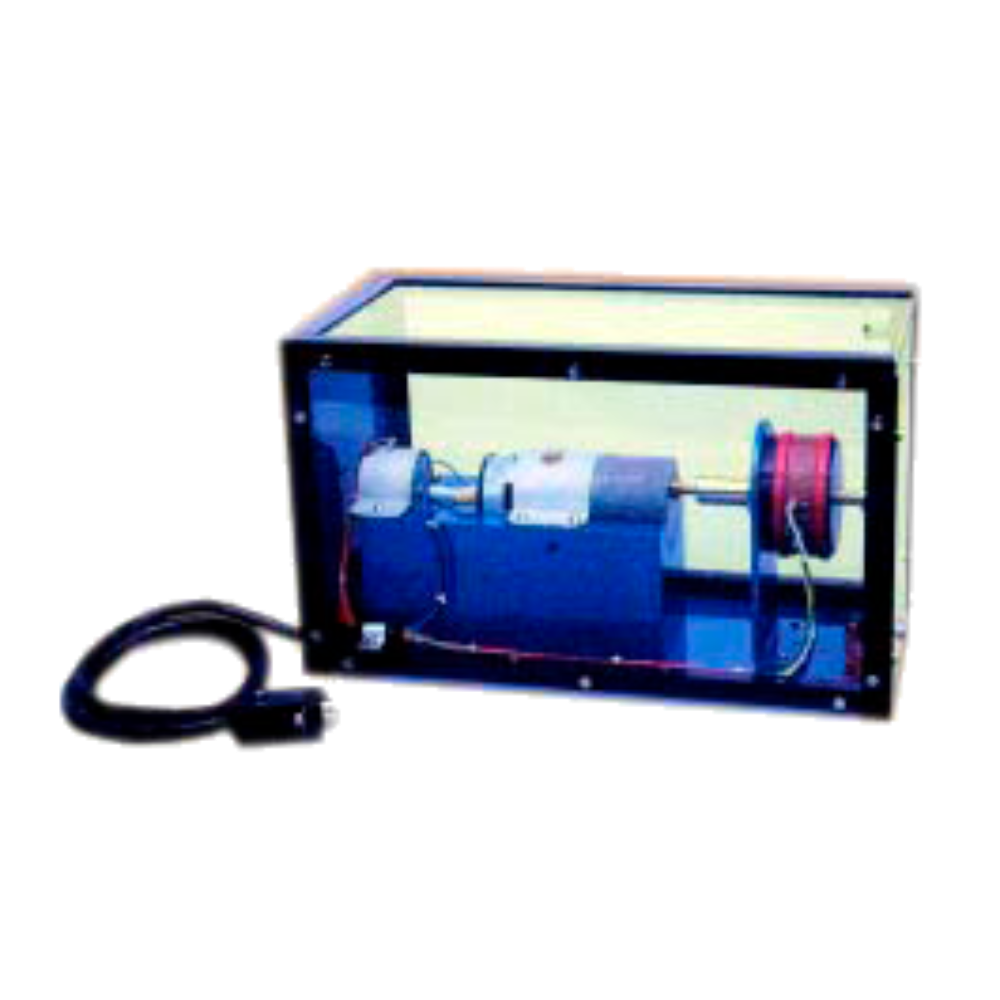
Speed and Position Transducer and Control Trainer with Power Supply and Software
Order Code: 23246952.1
Category: General Lab Equipment II
Technical Specification and Standards The system should contain the following training program: DC permanent magnets motor: general notions and mathematical modelization ...
SPECIFICATION
|
Technical Specification and Standards |
|
The system should contain the following training program: |
|
|
|
|
|
|
|
Study and calibration of the signal conditioners for: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Technical Specifications:
|
|
Terminals for the connections and measurements; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
External Unit for Speed and Position: The external unit should be composed of: |
|
|
|
|
|
|
|
|
|
|
|
Characteristics of the DC permanent magnet motor should be: |
|
|
|
|
|
|
|
|
|
Power Supply Unit: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Box Module: |
|
|
|
Personal Computer Interface with Data Acquisition Software: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Standard Accessories: The equipment / instrument which are required to carry out the required experiment should come under standard accessories. The following accessories should be supplied along with this equipment: o Storage case/box |
|
Technical Specification and Standards |
|
The system should contain the following training program: |
|
|
|
|
|
|
|
Study and calibration of the signal conditioners for: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Technical Specifications:
|
|
Terminals for the connections and measurements; |
|
|
|
|
|
|
|
|
Enquiry Form
Related Product







Tesca specialize in doing turnkey projects that is fully operable when it is handed over to the project authority. Starting from inception to application training, Tesca provides the services as ONE source solution. Working side by side with government authorities and people across the World, we help countries to perform better. We support countries grow their economies, strengthen their education and health systems and improve financial management. We do this by providing consultancy & training in environment safety, education, health strengthening.
Category
Useful Links
Contact Us
International Sales:
 91-9829132777
91-9829132777
91-9413330765
India Sales:
91-9588842361
2025 © All Rights Reserved.